GPS, SIG et robots : appliqués au semis ainsi qu’aux interventions de précision
Afin de réaliser des économies d’énergie, d’intrants, de main-d’œuvre, etc. Les robots et les interventions de précision semblent dessiner un nouvel avenir. Quels sont les principes de fonctionnement des systèmes de guidage et de commande des engins agricoles et des robots, par satellite en milieu extérieur ou par laser en intérieur ? Comment leur mise en œuvre au champ ou en serre pour la réalisation de semis ou d’autres interventions culturales de précision s’effectue-t-elle ?
Les principes de la localisation par satellite
La méthode de géolocalisation la plus couramment utilisée est la triangulation : un récepteur GPS reçoit les signaux des satellites (au moins quatre) et les utilise pour calculer les coordonnées de son antenne de réception. L’onde électromagnétique d’un satellite se propage à la vitesse de la lumière, la distance entre un satellite et le récepteur est donc obtenue par la mesure du temps de propagation de cette onde. Les coordonnées X, Y et Z de l’antenne de réception, soit longitude, latitude et altitude, sont ensuite converties dans un référentiel global sur terre, le WGS84. La précision de la géolocalisation par satellite, en théorie de l’ordre du mètre, varie en pratique de 3 à 50 mètres car le calcul de la géolocalisation est affecté par de nombreuses sources d’erreurs. Après correction, en se basant sur des stations de référence seules ou couplées en réseaux, on peut atteindre une précision de l’ordre du centimètre pour le système RTK (Real Time Kinematic). Il est alors possible de guider avec précision les engins mobiles et d’enregistrer leurs trajectoires.
Le guidage des engins agricoles par GPS
Le principe du guidage des engins agricoles est simple : ils sont équipés d’un récepteur GPS dont la double fonction est d’enregistrer la position et la vitesse de l’engin et de le guider suivant une trajectoire prédéfinie. Pour cela, ils agissent sur la direction du véhicule, soit par un système électrique installé au niveau du volant, soit par action directe sur le circuit hydraulique de direction. Le conducteur définit au premier passage dans le champ une ligne de référence, dite ligne AB (rectiligne ou courbe), A étant le point de départ et B le point atteint au bout de quelques dizaines de mètres. Une fois cette ligne enregistrée, le chauffeur définit la largeur de travail de l’engin. La console de guidage génère ensuite des lignes parallèles à la ligne AB que l’engin empruntera après le demi-tour en bout de champ.
Pour améliorer la précision des interventions culturales, il est possible d’ajouter un second récepteur GPS sur l’outil entraîné. Cela s’avère nécessaire en zone de relief accentué où l’outil, semoir ou bineuse, a tendance à dériver par rapport à la trajectoire du tracteur.
On peut aussi générer, sur les consoles de guidage, des lignes perpendiculaires aux lignes de référence, par exemple pour procéder au découpage régulier d’un champ en parties égales (planches de semis).
Géolocalisation et expérimentation
Pour un expérimentateur, peut-être amené à préciser les lignes de référence grâce à un système d’information géographiques (SIG), ces données cartographiques vont permettre d’implanter les essais dans les zones les plus homogènes pour simplifier les analyses statistiques. Quand la zone adéquate est déterminée, l’expérimentateur réalise sous SIG (cf. encadré) son plan d’essai (quadrillage de microparcelles) et définit les lignes caractéristiques : la ligne de guidage du tracteur (premier passage) et les lignes de déclenchement du semoir (perpendiculaires à la ligne de guidage) qui délimitent les microparcelles. Ces lignes sont transférées au format informatique sur la console du tracteur dont la double fonction est de le guider et de déclencher le semoir.
En maraîchage par exemple, ce système peut permettre de passer d’une planche de semis ou de plantation à la planche suivante sans avoir à procéder préalablement au piquetage du terrain. Bien entendu, la trajectoire empruntée par le tracteur pour le semis ou la plantation peut ensuite être réutilisée pour le binage, ce qui permet de biner au plus proche des lignes de la culture.
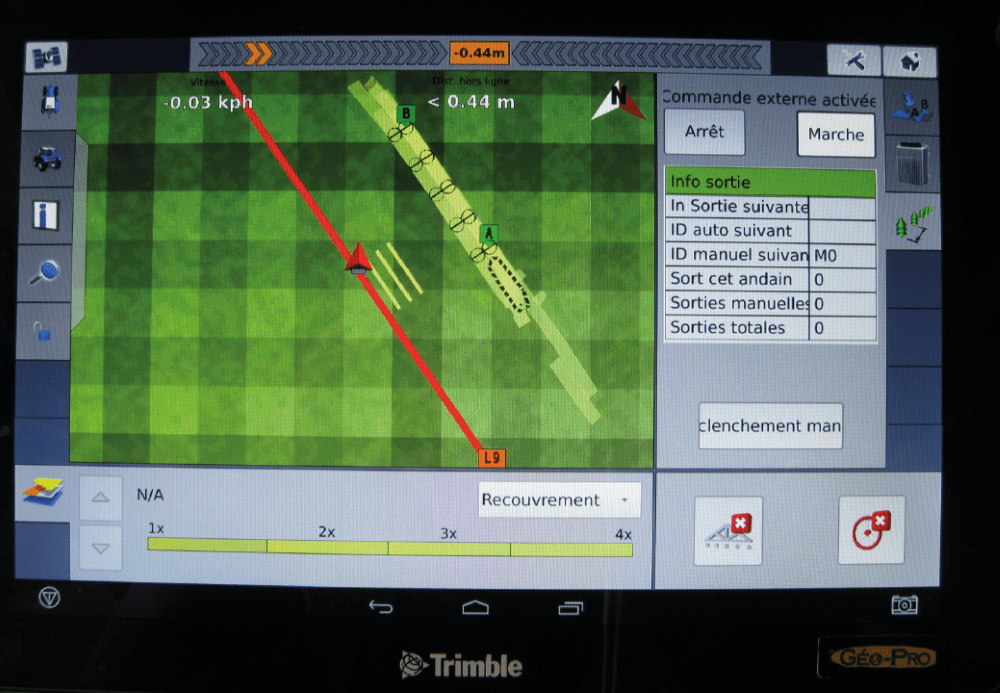
La ligne rouge est la ligne de guidage la plus proche de la position (antenne du récepteur GPS) du tracteur. La position du triangle rouge indique que l’engin n’est pas dans l’axe de la ligne de guidage ; il (son antenne) se situe à 0,44 mètre de celle-ci (cf. haut de l’écran). Les lignes jaunes parallèles à la ligne rouge matérialisent les passages suivants du tracteur. Elles passeront successivement au rouge quand le tracteur s’en approchera. Les petits cercles matérialisent les points de déclenchement du semoir entre microparcelles après semis de celles-ci.
Le volant (en bas à droite) passera au vert quand le chauffeur activera (par appui tactile sur cette icône) l’autoguidage. De même, un appui sur la rampe (icône à gauche de l’icône « volant ») activera le coloriage de la bande travaillée. Cette activation peut être rendue automatique à l’enclenchement de l’autoguidage. En haut à droite est précisé l’état de la commande externe de déclenchement du semoir : ici elle est activée.
DINO s’invite au champ
Le fonctionnement du robot de binage DINO, conçu par Naïo technologies, également guidé par GPS, s’appuie sur les mêmes principes. Il utilise la carte GPS de la plantation pour suivre les lignes et procéder au binage et aussi pour gérer ses demi-tours en bout de ligne. Cette carte GPS est réalisée lors de l’implantation de la culture en positionnant l’antenne GPS-RTK du DINO sur le semoir (ou planteur) et en la connectant à un smartphone pour la récupération des données géolocalisées. La finalisation de la carte GPS inclut une étape de mise en forme par Naïo Technologies avant chargement sur le robot via une clé USB.
La précision au binage est affinée sur le DINO par un système de caméra, qui ajuste en continu la position de l’outil, en position ventrale sous le robot. Ceci requiert le paramétrage préalable des caractéristiques de la culture (nombre de lignes de la culture chevauchées par le robot, largeur et hauteur moyenne des rangs de la culture).
Le guidage des robots « indoor »
Il existe des solutions de géopositionnement et de guidage autres que les satellites, particulièrement pour des applications en intérieur où les signaux des satellites ne peuvent être captés. La diversité des robots en cours de déploiement augmente rapidement. Le robot OZ, développé par Naïo Technologies pour les maraîchers, est l’un d’entre eux.
OZ dispose de deux modes de guidage : une caméra (qui détecte le vert de la culture) pour des rangs de plantes basses (salades, haricots, céleris, etc.) de moins de 15 cm de hauteur, et un lidar, laser qui mesure les distances aux objets situés à l’avant, pour la sécurité frontale, et sur les côtés, pour se guider sur la culture, dans le cas de cultures de plus de 15 cm (poireaux, oignons, carottes, etc.). Il se repère aux lignes de culture et détecte les fins de ligne, qui doivent être matérialisées par des piquets de couleur rouge. L’opérateur enregistre sur la console de commande du robot plusieurs paramètres de description de la culture à biner : distance entre les rangs (c’est-à-dire largeur des allées), épaisseur du rang, distance entre plants sur le rang, nombre d’allées à biner et sens des demi-tours (droite ou gauche). Le robot, qui travaille le sol sur une largeur variable de 50 à 75 cm, calcule le nombre de passages nécessaires au binage de chaque allée. Une fois le paramétrage enregistré et le mode « binage » activé, il réalise, en totale autonomie, le binage de la parcelle.
OZ peut en outre être utilisé en assistance, pour la récolte des légumes par exemple : si on lui programme une vitesse d’avancement et un mode « parcours », il suit une ligne et accompagne le cueilleur qui déposera ainsi la récolte dans un conteneur porté ou traîné par le robot.
Les avantages et les limites du guidage GPS et des robots
Avec l’autoguidage de son engin, le chauffeur gagne en confort de travail : plus besoin de tenir le volant, sauf pour les demi-tours, encore que des systèmes récents permettent d’automatiser le demi-tour en bout de champ. La précision obtenue permet d’éviter les recoupements de ligne et d’économiser les intrants. Les utilisateurs estiment que ces économies varient entre 5 et 10 %.
La précision obtenue par le GPS facilite l’adoption de techniques alternatives aux pesticides, particulièrement en rendant plus efficace le binage mécanique. L’avènement des robots bineurs permet de gagner en efficacité en effectuant les interventions plus tôt en végétation sans affecter la culture.
André Gavaland, Paul Bataillon, Gilles Tison,
Inra, Unité expérimentale grandes cultures Auzeville F-31326 Castanet Tolosan
Gaëtan Séverac
Naïo Technologies, 235 rue de la Montagne Noire 31750 Escalquens
Pour aller plus loin
Consultez les publications de l’ISPA (International Society of Precision Agriculture) : https://www.ispag.org
12e conférence européenne sur l’agriculture de précision, Montpellier du 8 au 11 juillet 2019 : https://ecpa2019.agrotic.org. La problématique « précision en horticulture » y sera traitée.
Forum international de la robotique agricole (Fira) : https://www.fira-agtech.com
Numéro spécial « GPS&SIG » du cahier des techniques de l’Inra (2014). https://www6.inra.fr/cahier_des_techniques/Les-Cahiers-parus/Les-N-Speciaux/GPS-SIG